HK330 Համակարգիչ CNC վահանակի սղոց
Ապրանքի տեսանյութ
Համակարգչի CNC վահանակի սղոց HK330
1. Ըստ մուտքային ափսեի լայնության, կտրեք պահանջվող ափսեը և արագ վերադարձրեք սկզբնական աշխատանքային վիճակին:
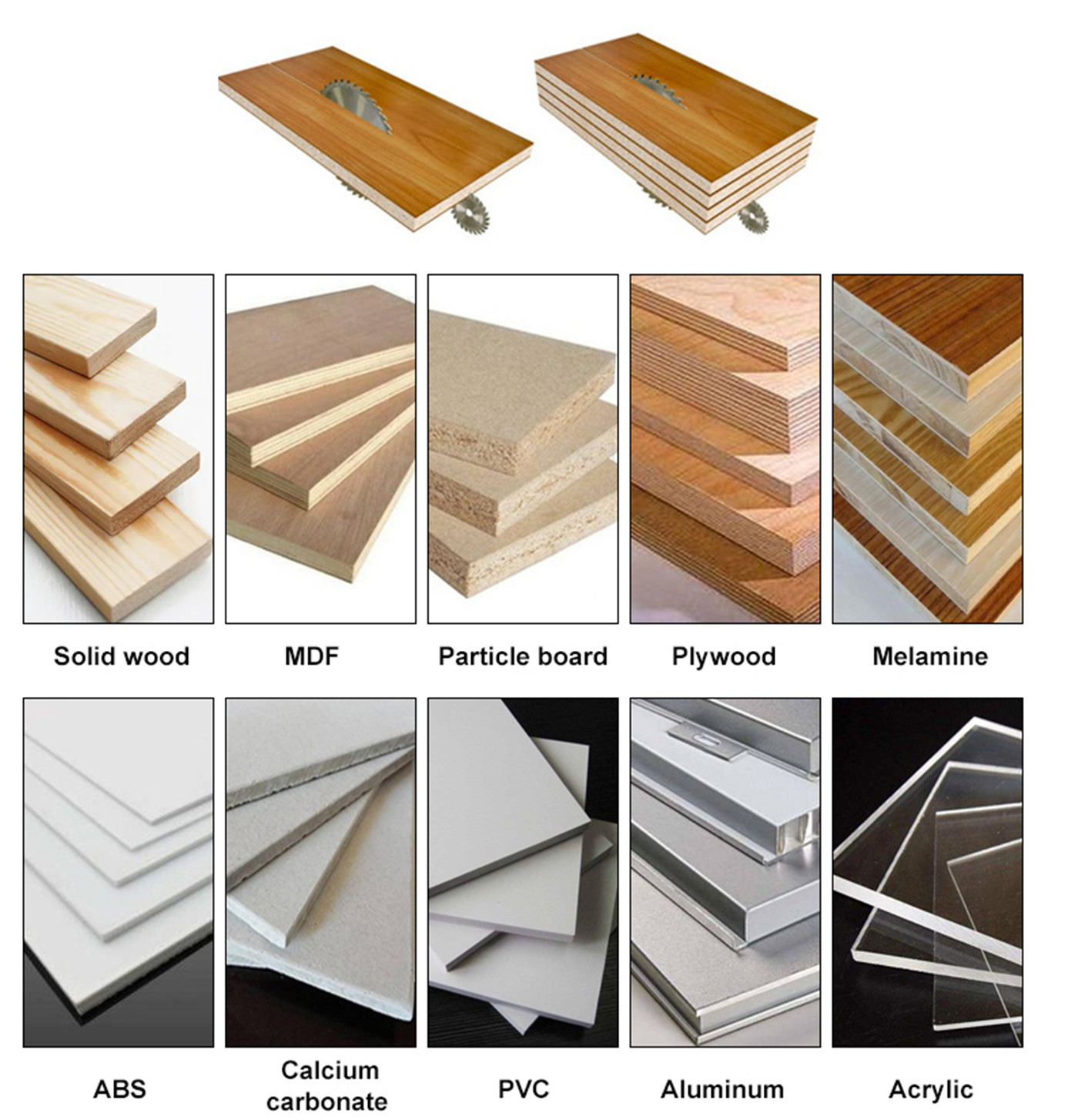
2. Կտրման արագությունը վերահսկվում է հաճախականության փոխարկիչով, որը կարող է հաղթահարել տարբեր հաստության և տարբեր նյութերի թիթեղները:
3. Սնուցումը ընդունում է օդաճնշական լողացող կաթիլ սեղան, և ծանր ափսեի նյութը հեշտ է փոխել: Ռոբոտը ավտոմատ կերպով սնվում է, ունի աշխատանքի ցածր ինտենսիվություն և արտադրության բարձր արդյունավետություն:
4. Օգտագործեք ներմուծված Delta servo շարժիչը արհեստական սխալը վերացնելու և չափերի ճշգրտությունը բարելավելու համար:
Տեխնիկական պարամետրեր
| HK330 | ՊԱՐԱՄԵՏՐ |
| Կտրման առավելագույն արագություն | 0-80մ/ր |
| Առավելագույն կրիչի առավելագույն արագություն | 100 մ/րոպ |
| Հիմնական սղոցի շարժիչի հզորություն | 16,5 կվտ (ըստ ցանկության 18,5 կվտ) |
| Ընդհանուր հզորություն | 26,5 կՎտ (ըստ ցանկության 28,5 կՎտ) |
| Առավելագույն աշխատանքային չափը | 3300L*3300W*100H(մմ) Լրացուցիչ 120H (մմ) |
| Նվազագույն աշխատանքային չափը | 34լ*45Վտ(մմ) |
| Ընդհանուր չափս | 5300L*5950W*1900H(մմ) |

Համապատասխանում է մեծ ափսեի մշակման պահանջներին՝ 2800 * 2800 մմ սղոցի առավելագույն չափով և 105 մմ սղոցի հաստությամբ և ավելի լայն կիրառելիությամբ։

Servo մեխանիկական սեղմիչ ձեռքի 11 միակ ամենամեծ դիզայնի մեխանիկական սեղմիչ

Ռոբոտային թեւն ընդունում է բարձր ճշգրտության ճիճու փոխանցման ռեդուկտոր և սնուցող հանդերձանքի դարակ՝ ± 0,1 մմ կտրման ճշգրտությամբ։
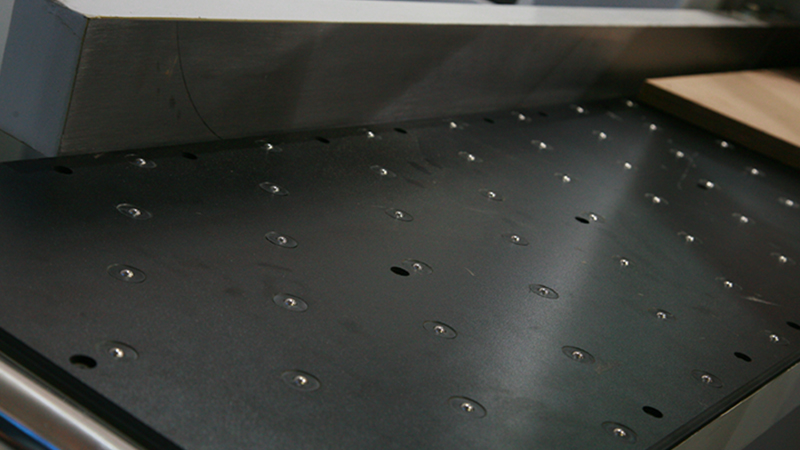
Աշխատասեղանը պատրաստված է օդաճնշական լողացող հարթակից։ Այն շատ հեշտ է տեղափոխել վահանակները
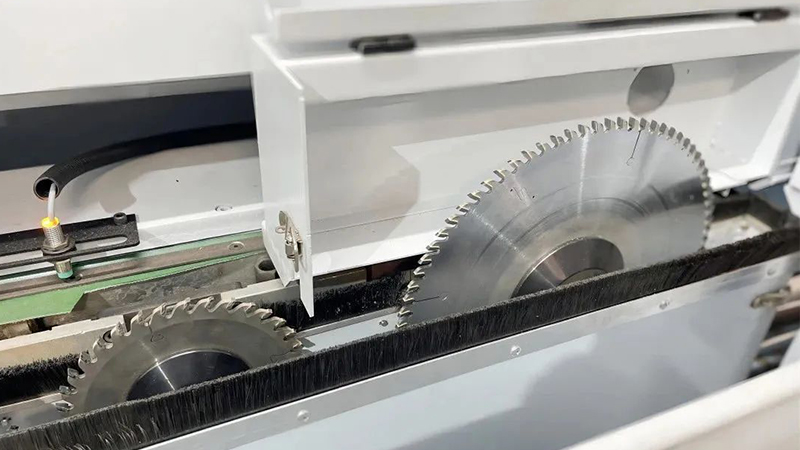
Սղոցային սղոցը կարող է ավտոմատ կերպով փոխարկվել ըստ սղոցի կարիքների: Համագործակցեք հիմնական սղոցի հետ՝ բարձրորակ սղոցման համար
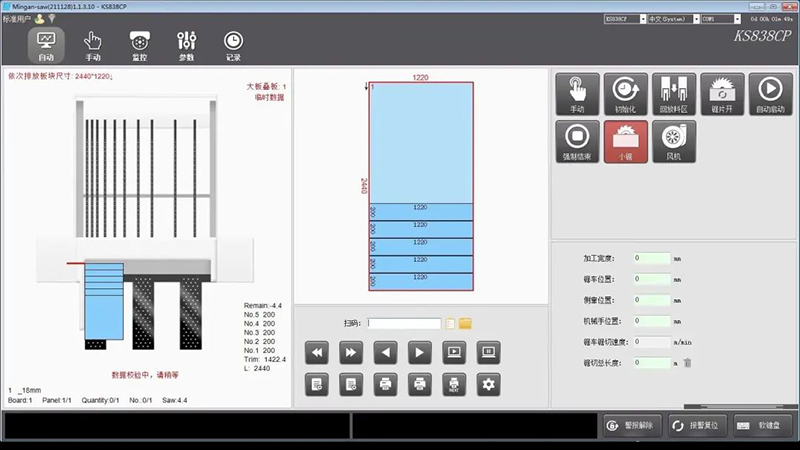
Ընտրովի օպտիմիզացման ծրագրակազմ նյութի դասավորության ավտոմատ օպտիմալացման համար և
սղոցումՀամակարգչի CNC վահանակի սղոց
Նմուշ